
I received my PhD degree from the Graduate School of Information Science and Technology, Osaka University in 2025. I was affiliated with the Bio-Inspired Networking Laboratory during my studies. I will be working in the industry.
Research
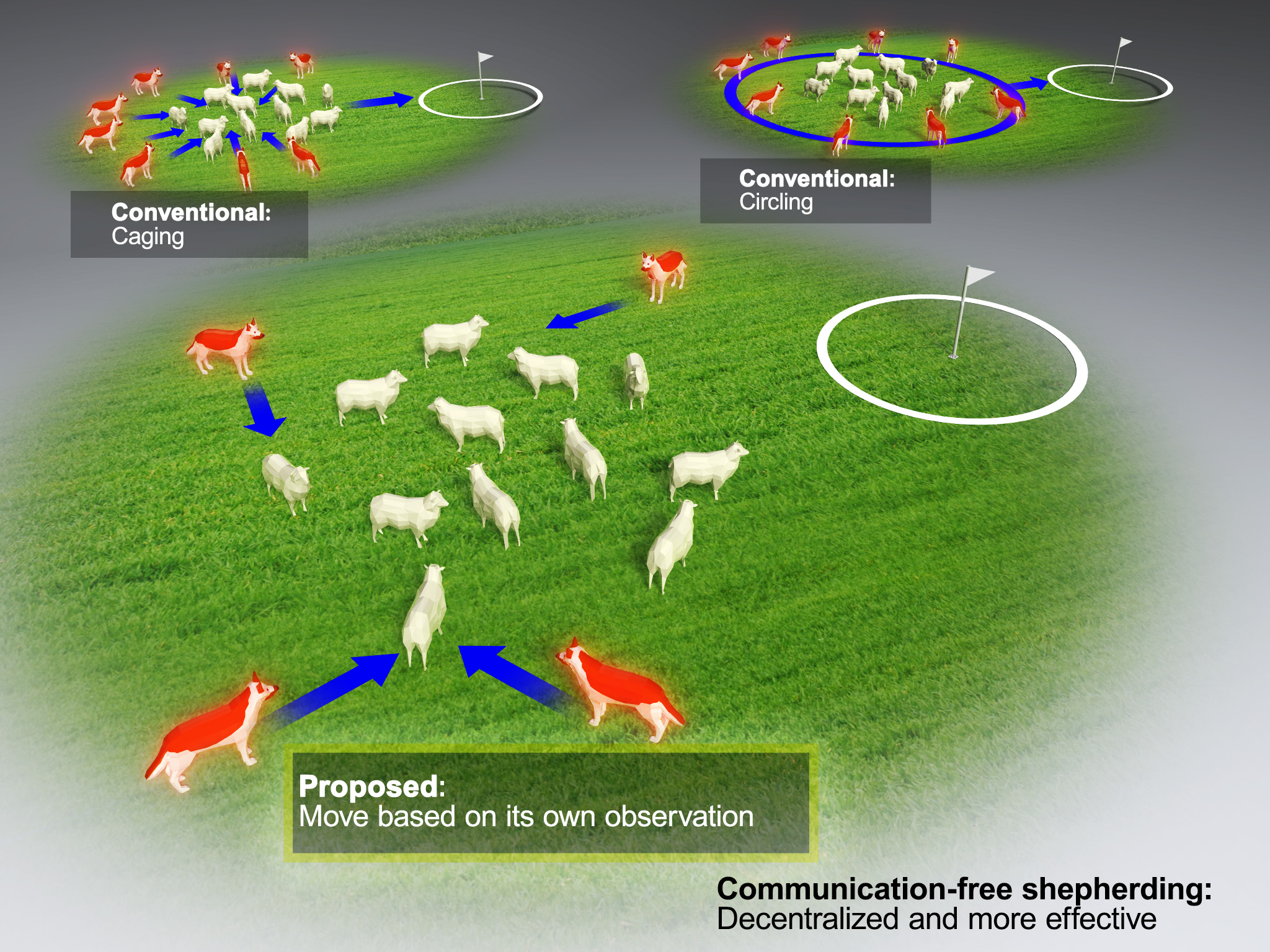
My research has focused on swarm guidance and shepherding problem. I am currently interested in applying reinforcement learning to autonomous driving PnC and Game AI.
Selected projects
- Strategy-based Reinforcement Learning in Swarm Shepherding.
- Swarm Shepherding using Bearing-only Measurements, Philosophical Transactions of the Royal Society A, 2025.

- Communication-free Shepherding Navigation with Multiple Steering Agents, Frontiers in Control Engineering, 2023.
- Unity-based Interactive Shepherding Game: link, 2022.

- Semi-autonomous Leader-follower Approach for Swarm Drone Guidance, 第36回自律分散システム・シンポジウム, 2024.

- Automatic Recording of Wild Animals using Video Bio-loggers with On-board Light-weight Outlier Detector,” PNAS Nexus, 2024.
